

创作上传
VIP
收藏下载
登录 | 注册有礼
查看完整案例

收藏

下载

分享
翻译




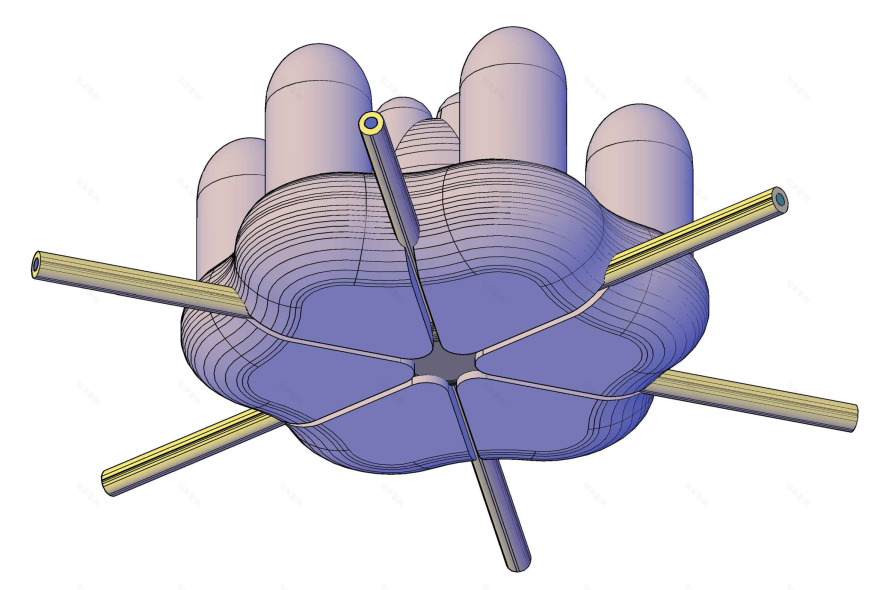












The initial idea for CJ_#1 was inspired by recent research conducted at the Harvard University, where a pneumatic-based soft robot was created called Octobot, which can move with a high degree of autonomy.
Soft robotics takes a different approach to the idea of a moving machine, in which the priority is not on the geometric precision of movement in space, but on controlling its ability to adapt to changing environmental conditions. Control of the indeterminate.
What we find fascinating is the
in an object designed to interact with the human body. The body is a always a “one-off”. Its very identity, living material, senses and thoughts are not repeatable. And our experience of the inanimate world around us is not universal. It is a unicum. That is why we needed something completely different.
Year 2017
Work started in 2016
Work finished in 2017
Status Research/Thesis
Type Custom Furniture / Furniture design / Product design / self-production design
南京喵熊网络科技有限公司 苏ICP备18050492号-4知末 © 2018—2020 . All photos and trademark graphics are copyrighted by their owners.增值电信业务经营许可证(ICP)苏B2-20201444 苏公网安备 32011302321234号
苏公网安备 32011302321234号
苏公网安备 32011302321234号客服
消息
收藏
下载
最近