

创作上传
VIP
收藏下载
登录 | 注册有礼
查看完整案例



收藏

下载

分享
易思维自动式间隙面差测量系统
Auto-Gap
专为汽车外覆盖件匹配间隙面差的高精度、自动化在线检测而设计。
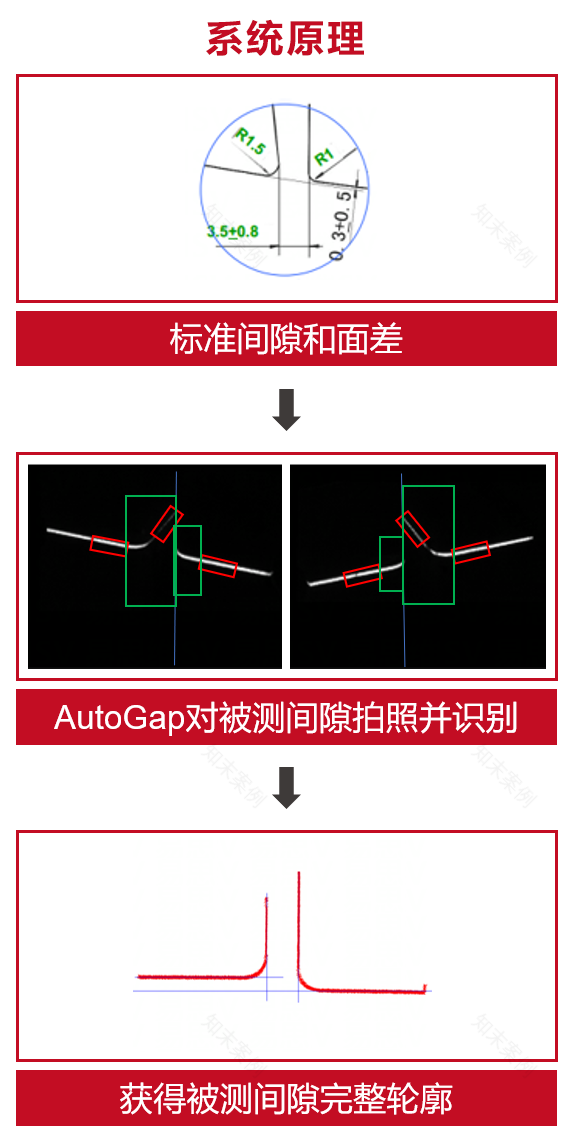
系统采用了特有的抗干扰光技术和自研的图像算法技术,取代传统人工检测方式,实现更加准确的间隙和面差检测,顺应了现代汽车制造自动化、数字化趋势和智能制造大数据潮流。

01AutoGap 系统特征
硬件上,AutoGap 采用了特有的双侧传感器结构,能够同时从两个视角获取间隙内部完整轮廓,避免了单侧传感器测量不准确或旋转带来的操作不便。
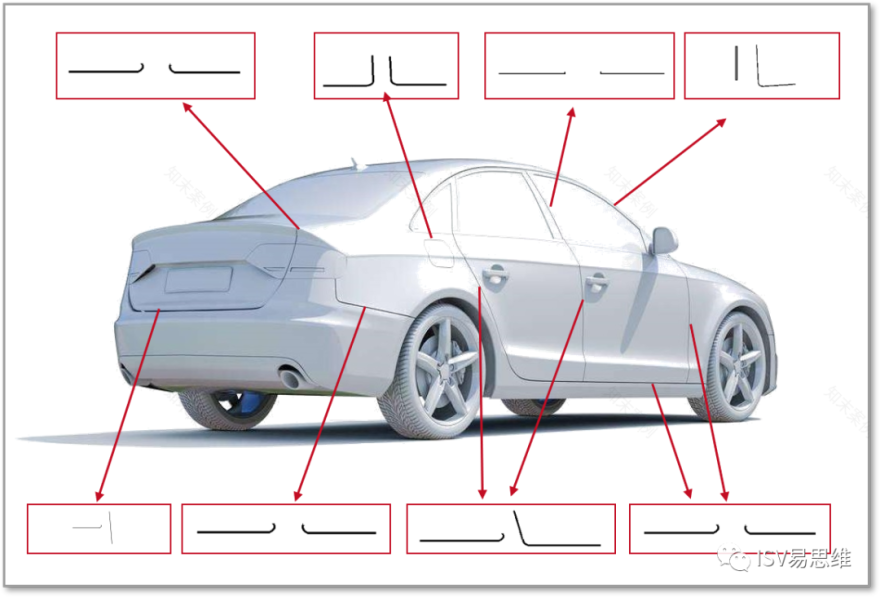
软件上,针对焊装车间和总装车间不同测点的间隙类型,易思维 AutoGap 具备多种评价算法,可以针对不同测点的间隙和面差形貌,调取最佳算法进行测量。
02AutoGap 系统方案
易思维自动式间隙面差测量系统组成
易思维自动式间隙面差测量系统主要由间隙面差测量子系统、车身定位子系统、数据大屏显示子系统和工业机器人、VIN 扫码设备和光电触发装置等工位自动化设备组成,适用于 moving line 或 stop & go line 等不同车身输运线,且能根据客户现场实际情况提供定制化的解决方案,目前在国内主机厂焊装及总装车间均有成功案例。

1. 间隙面差子系统:用于获取间隙形貌的 3D 空间坐标并结合上位机测量软件计算准确的间隙面差值。

2.车身定位子系统:用于获取车身位姿偏差并发送给测量机器人,引导机器人在准确的测点位置进行测量,取消了高精度定位夹具。

3.大屏显示子系统:用于实时显示所有测点间隙和面差数据,以及各个测点的趋势图。后台软件支持多屏异显功能,分别展示车身各个位置测量结果,为不同工位操作员提供参考。

4.工位自动化设备:包括装载 Autogap 测量传感器的测量机器人、用于车身到达的光电触发装置、用于获取车身 VIN 扫描的扫码设备等等。
自动式间隙面差测量系统仿真视频
自动式间隙面差测量系统工作流程(以焊装车间 moving line 为例)

Step1
扫描车身 VIN
车身进入自动检测工位。触发光电开关,扫码设备扫描车身 VIN 并同步到测量软件。
Step2
获取车身位姿偏差
车身继续向前,触发第二个光电开关,定位传感器对车身位置定位,并把位置偏差同步给机器人。
Step3
AutoGap 进行测量
车身继续往前,触发第三个光电开关,机器人开始跟随车身进行间隙及面差测量。
Step4
大屏显示测量数据
测量完毕后,将该车的测量结果投射到大屏显示器上,以便后续返修工位参考。
03AutoGap 产品优势

AutoGap 产品优势
1)测量速度快:单点测量时间小于 0.5s(仅视觉测量时间,不包含机器人移动时间);
2)工位柔性高:支持多车型、多颜色混线检测,能自动调取对应测量计划,对于新增车型无需额外增加硬件;
3)检测能力强:支持左右色差较大的工件、透明件、高反光件等高难度工件检测;
4)数据分析全:自研数据软件分析平台具有丰富的 SPC 功能,能提供 CP/PP、CII、合格率等统计报表,趋势图、相关性趋势图、直方图等数据分析图表,Excel 和 PDF 等格式报表。
易思维(杭州)科技有限公司
公司地址
杭州:滨江区长河街道江南大道 1088 号
天津:滨海高新区海泰发展六道 3 号星企中心
0571-86776069
公司网站

 50
502021/11/22 16:46:51
332021/09/28 17:09:23
1112021/05/31 18:43:13
692021/03/05 16:51:53
142019/06/20 16:58:25
南京喵熊网络科技有限公司 苏ICP备18050492号-4知末 © 2018—2020 . All photos and trademark graphics are copyrighted by their owners.增值电信业务经营许可证(ICP)苏B2-20201444 苏公网安备 32011302321234号
苏公网安备 32011302321234号
苏公网安备 32011302321234号客服
消息
收藏
下载
最近